

Research & Assistive Devices
The sophistication of the hand’s neuromuscular system, while making it incredibly versatile, also challenges our ability to improve sensorimotor deficits caused by neurodegenerative disease, e.g., stroke, or replace basic function following traumatic injury, e.g., limb loss. Given these challenges, understanding fundamental sensorimotor control mechanisms is critical to optimize translational efforts and clinical outcomes. The main goal of our work on development of research and assistive devices is to combine industrial and customized technologies to quantify sensorimotor mechanisms in healthy and impaired subjects. We believe that the exploration of this technology has two advantages. First, from a rehabilitation perspective, advanced customized devices allow the rigorous quantification of sensorimotor mechanisms and deficits. Second, psychophysical investigation of user-device interactions can provide insights into potential applications to a broader range of human-machine interaction scenarios, e.g., teleoperation, virtual and augmented reality, and applications in clinical settings.
Below we provide a description of our contributions to the development of research approaches and devices.





Sensorized grip devices
We have designed and built objects with torque/force sensors to precisely measure biomechanical variables, e.g., fingertip center of pressure and 3D forces. These devices have been instrumental in understanding critical control phenomena, such as digit force-to-position modulation and the interplay between sensorimotor memory and online feedback.
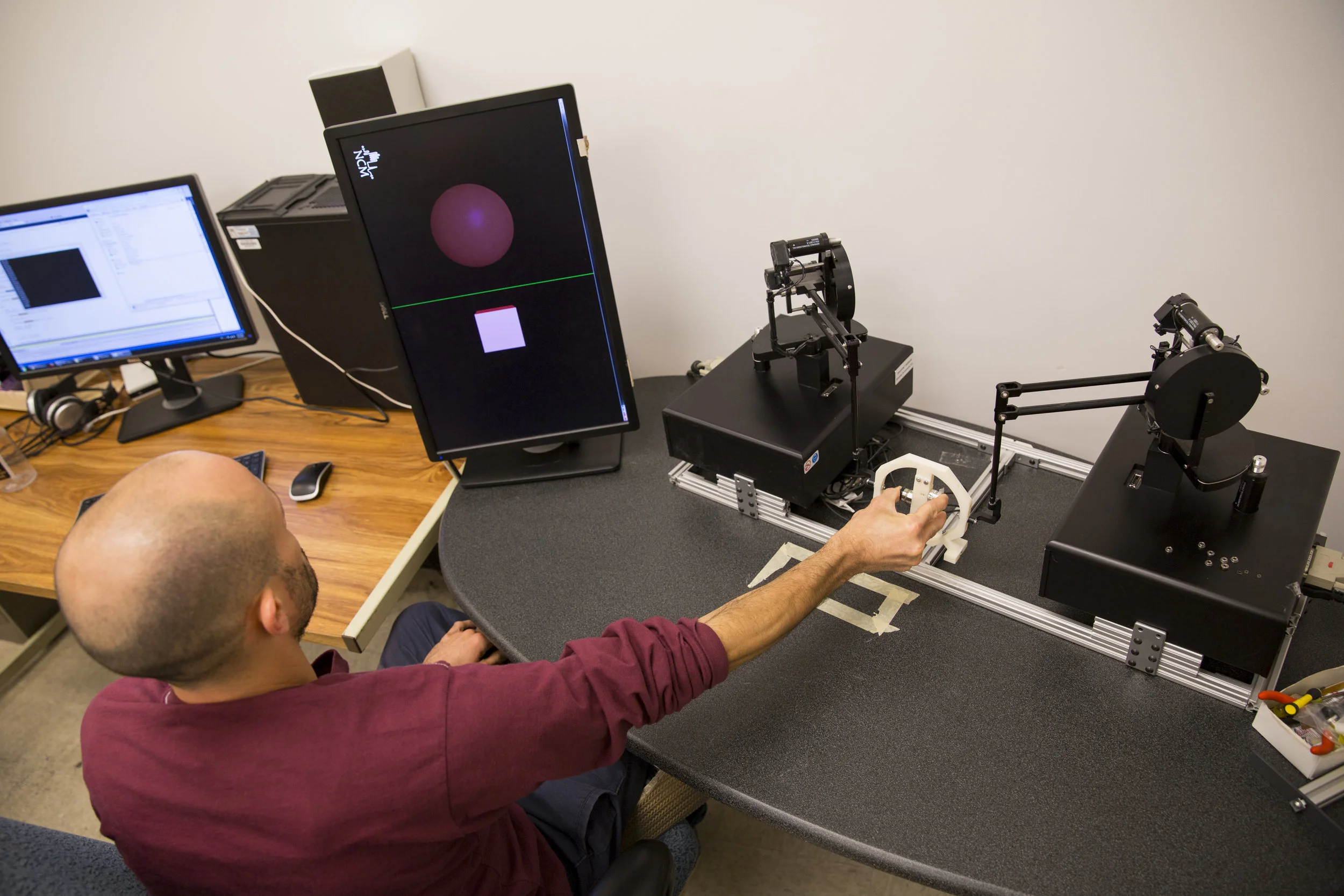
Haptics
We have been using commercially-available haptic technologies to investigate the mechanisms underlying dexterous manipulation and explore scientific applications of customized tactile devices. Examples of these applications include the use of an impedance-based haptic interface (Phantom Premium) to test hypotheses on the role of vision and sensorimotor learning of manipulation forces. We have also used a customized wearable haptic device to quantify the roles of tactile and non-tactile inputs for fingertip distance estimation.
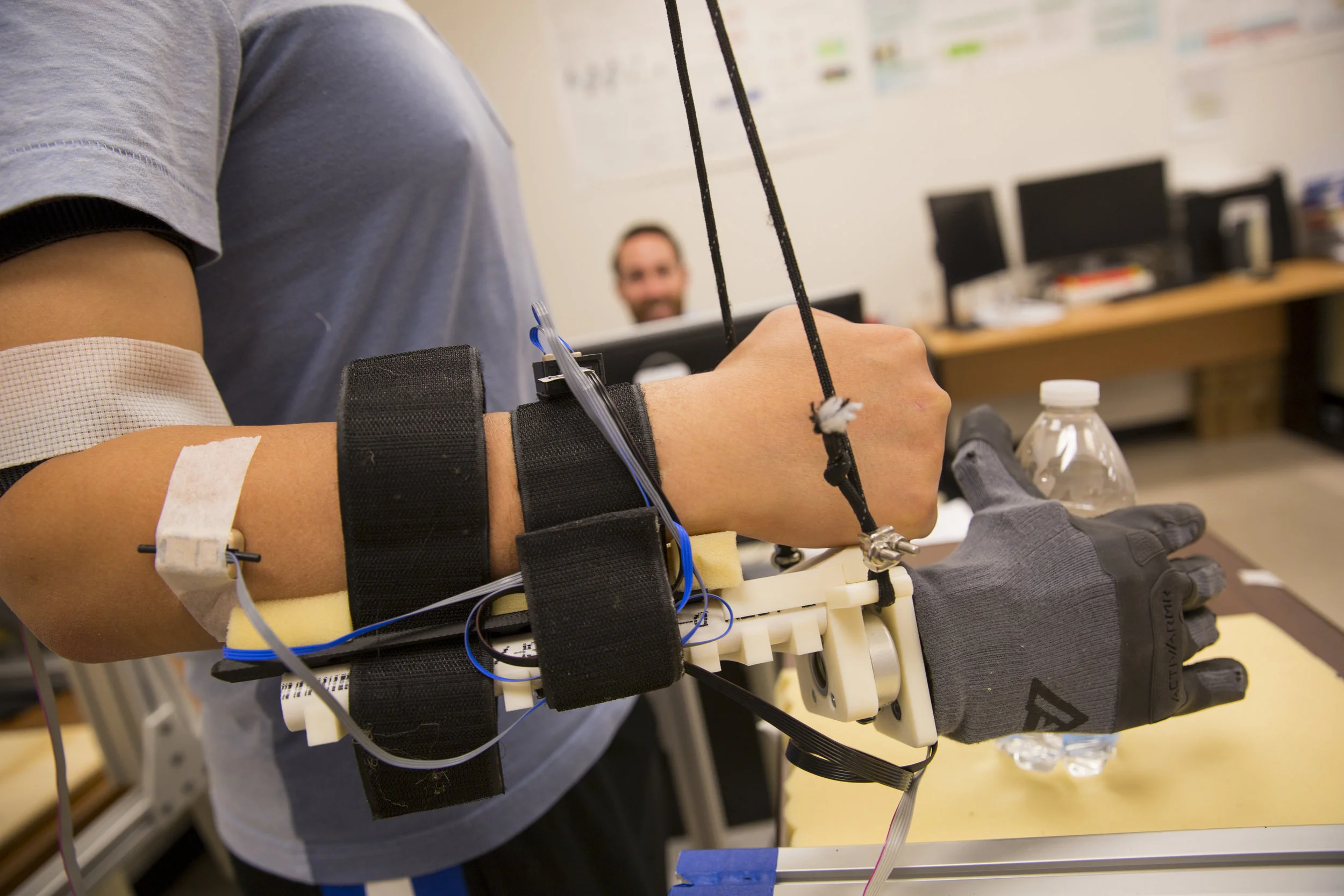
Hand prosthetics
We have been working with Prof. Antonio Bicchi and his team at Centro E. Piaggio, University of Pisa, and the Italian Institute of Technology, and the Mayo Clinic, Rochester, MN (Drs. Kristin Zhao and Karen Andrews) on testing a soft-synergy prosthetic hand, the Soft Hand Pro (SHP). Our laboratory has worked on several projects aiming at identifying strengths and weaknesses of the SHP in able-bodied individuals.